Overview
This analysis is from an assignment in ESM 270 (Conservation Planning) at the Bren School of Environmental Science & Management at the University of California, Santa Barbara. The assignment focused on modeling movement patterns and connectivity for the jaguar (Panthera onca) across southern Costa Rica with Circuitscape. It was required to be limited to two pages, with a figure included, hence the brevity of the write-up. The analysis aimed to identify important movement corridors and barriers between core areas in the Talamanca-Osa region of southern Costa Rica to support jaguar connectivity and continued movement across the landscape.
Background & Problem
Throughout the last 100 years, southern Costa Rica has undergone significant agricultural expansion and urban development. This has had adverse impacts on many species occurring throughout the region, especially jaguars (Panthera onca) which are forest-dependent with wide home ranges and require large areas of undisturbed habitat; therefore, making them particularly vulnerable to fragmentation. Increasing fragmentation in this region has resulted in two disconnected jaguar populations. To reconnect them and support their continued persistence throughout the southern Costa Rican landscape, land managers and conservation practitioners need to understand the species’ movement patterns and barriers hindering movement connectivity.
Approach
Circuitscape and Linkage Mapper were used to model connectivity across the study area in ArcGIS Pro v3.0. Circuitscape is a tool that treats landscapes as conductive surfaces, utilizing connections between random walk theory and electrical circuit theory to predict aspects of movement and connectivity between important patches of a landscape. This analysis employed three Linkage Mapper modules to analyze jaguar movement and connectivity between identified core areas in the Talamanca-Osa region of southern Costa Rica: Linkage Mapper, Pinchpoint Mapper, and Barrier Mapper. The core areas are 3 national parks in the region–Corcovado, Piedras Blancas, and La Amistad which was clipped to the study area.
The first step of the analysis was to map the least-cost corridors between the three core areas with Linkage Mapper using a cost-weighted distance (CWD) threshold of 20,000 m. This served to create a distribution of CWDs of the best route passing through each cell across the study area, with lower values being closer to the LCP and higher values being more costly/resistive. Next, Circuitscape was run using Pinchpoint Mapper to inject ‘electrical current’ into the core areas and facilitate its flow across the landscape between cores. This step was conducted twice, once with a CWD cutoff distance of 1,000,000 m to run Circuitscape across the entire resistance surface, and once with a CWD cutoff distance of 20,000 m to constrain current flow to the least-cost corridor. As implied in the tool’s name, flowing current concentrates in ‘pinch-points’, representing areas where jaguar movement is likely to be funneled through a narrow area. Lastly, the Barrier Mapper tool was used to identify important barriers running along and adjacent to the LCP. A barrier detection radius of 1000 m was used, detecting barriers up to 2 km across.
Results
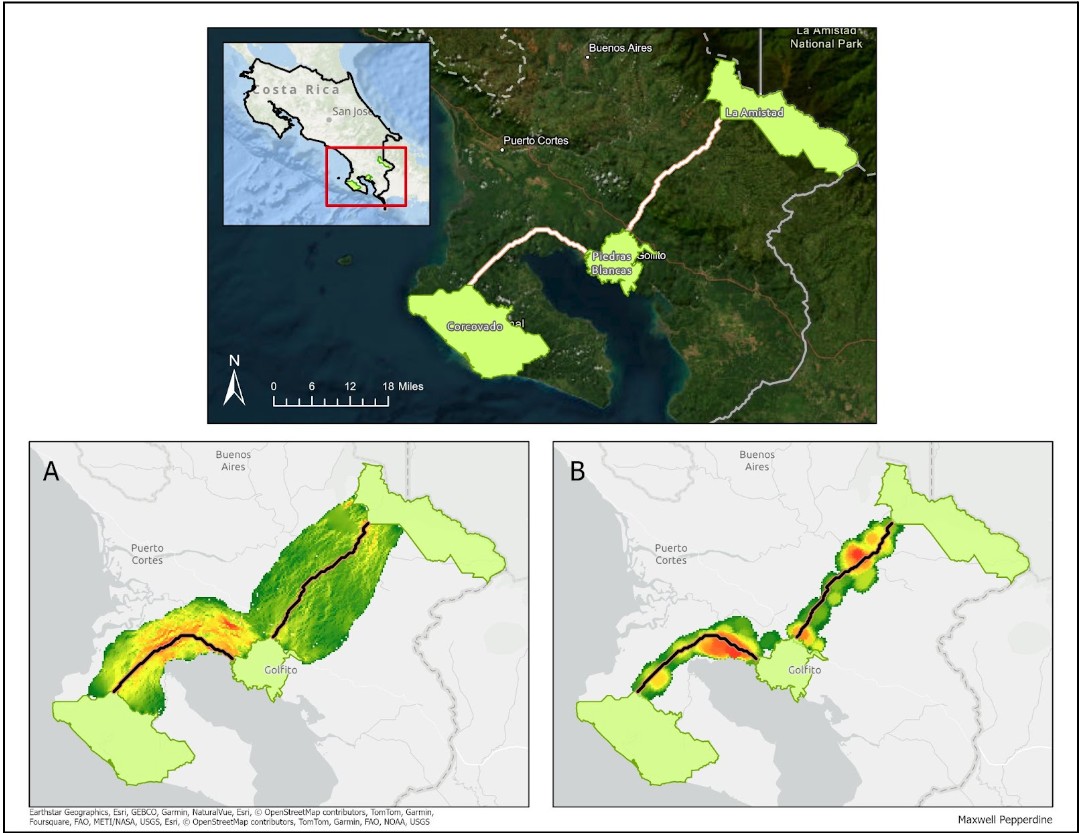
Results of the Circuitscape and Linkage mapper analysis are shown in Figure 1 below. Figure 1(A) portrays the Circuitscape and Pinchpoint Mapper analysis with a CWD cutoff distance of 20,000 m to constrain current flow to the least-cost corridor defined in the first step of the analysis. Areas in red represent higher values and regions where the corridor is more constricted (and jaguar movement is concentrated), with green regions as lower values and less constricted areas. Pinchpoint Mapper was designed to run Circuitscape within identified least-cost corridors to map pinch-points within these areas; however, running this tool across an entire landscape can also provide valuable information regarding alternative movement routes and stepping stones. Figure 1(B) shows the result of the Barrier Mapper analysis. Again, red areas represent higher values that indicate barriers with the most significant effect on CWDs between core areas.
Conclusion
This analysis provides valuable insight into jaguar movement between 3 core areas in the Talamanca-Osa region of southern Costa Rica. The Circuitscape analysis identified pinch-points within the least-cost corridors connecting core areas (Figure 1(A)). These regions are extremely important for connectivity and ensuring continued movement by jaguars across the landscape. They represent locations where jaguar movement is likely to be funneled through more narrow areas and vulnerable regions where a loss or degradation of habitat might significantly alter or sever important movement linkages. Barriers surrounding LCPs with the strongest effect on CWDs between core areas also represent more vulnerable areas within the landscape (Figure 1(B)), and conservation planning efforts should be focused in these locations to improve connectivity in high resistance areas within identified corridors.
One important consideration that isn’t captured in this analysis is the impact that increased jaguar connectivity or habitat might have on surrounding rural subsistence farmers in the region. Throughout the modeling process and selection of regions to focus connectivity enhancement on, land managers and conservation practitioners should engage local community members and ensure a diverse range of voices are included to incorporate important socioeconomic dynamics of conservation planning.
Acknowledgements
This assignment was created and organized by Ashley Larsen, an Associate Professor at the Bren School and the instructor for ESM 270 (Conservation Planning). ESM 270 is offered in the Master of Environmental Science & Management (MESM) program at the Bren School.
Citation
@online{pepperdine2024,
author = {Pepperdine, Maxwell},
title = {Exploring Habitat Connectivity Between Core Areas in a
{Costa} {Rican} Landscape},
date = {2024-09-17},
url = {https://maxpepperdine.github.io/posts/2024-09-17-connectivity/},
langid = {en}
}